Synthesis of Depth images from RGB images
Practical Project, Chair of Computer Graphics and Visualization, TUM, Munich
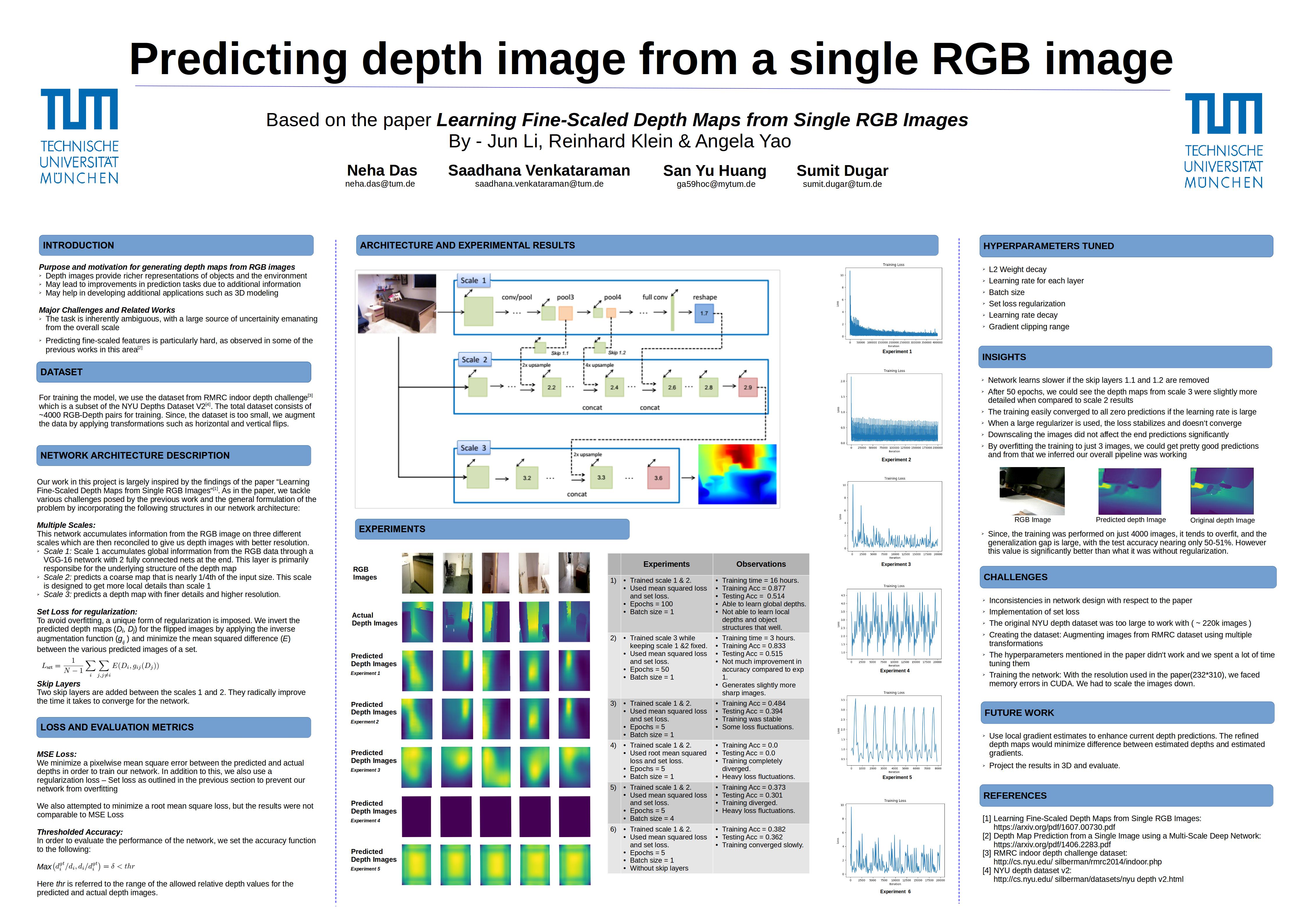
Depth images are a rich source information about their subjects and have been found to be particularly useful for tasks such as 3D Reconstruction. This work aims to learn a supervised pixel to pixel mapping from an RGB image to its corresponding depth image. The architecture in this work is based on the paper by Li, Jun, Reinhard Klein, and Angela Yao. “Learning fine-scaled depth maps from single RGB images.” arXiv preprint (2016)
For more details, see the poster below.
 .
.